


Description
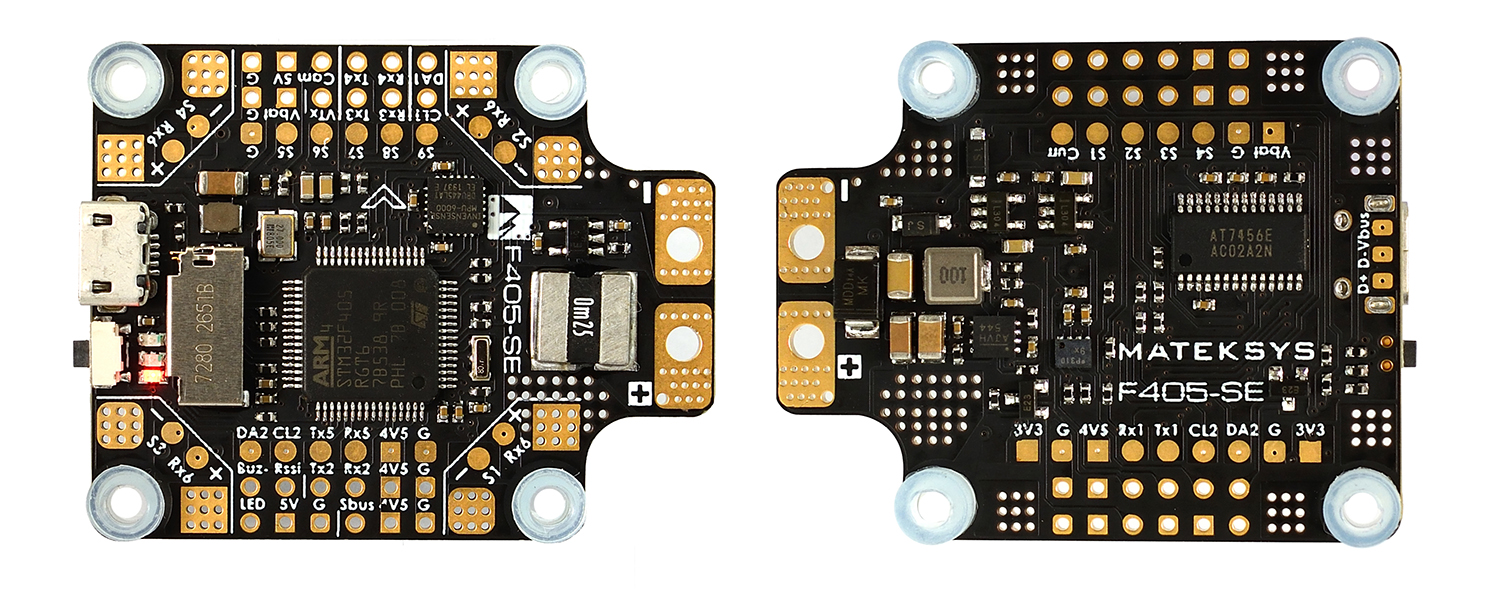
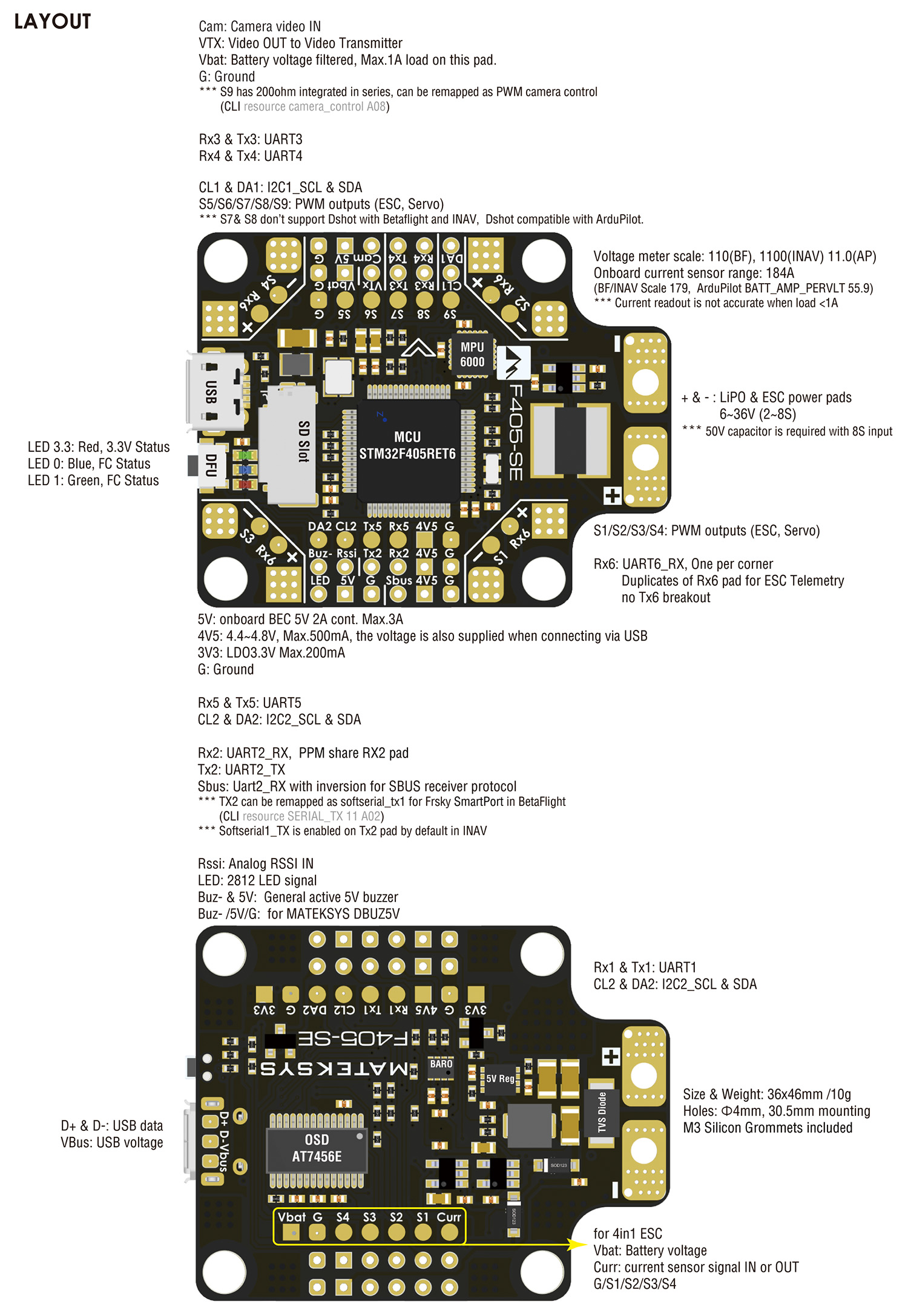
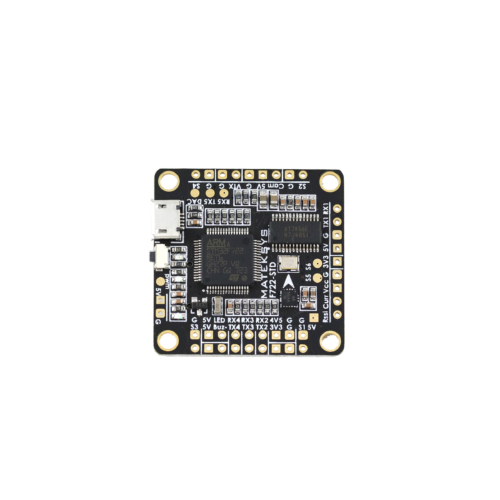
MATEK F405-SE FLIGHT CONTROLLER (NEW)
STM32, MPU6000, DPS310 Baro, m.SD, OSD and 6 uarts.

SPECIFICATIONS
- MCU: 168MHz STM32F405RET6
- IMU: MPU6000 (SPI)
- Baro: DPS310 (I2C)
- OSD: AT7456E (SPI)
- Blackbox: MicroSD slot (SPI)
- VCP & 6x Uarts, 1x Softserial_Tx supported
- 9x PWM outputs (7x Dshot compatible with BF/INAV)
- 2x I2C
- 3x ADC (voltage, current, RSSI)
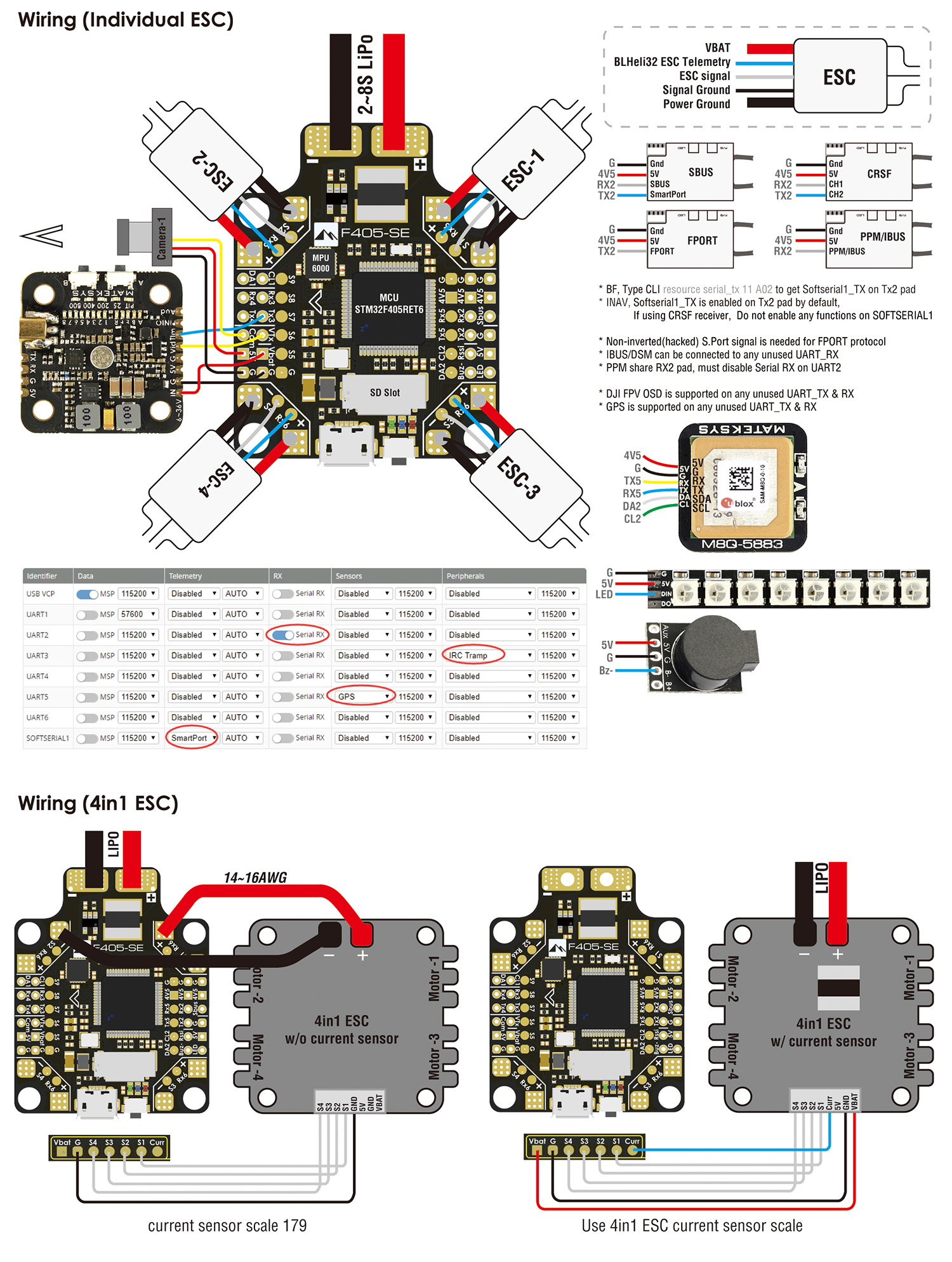
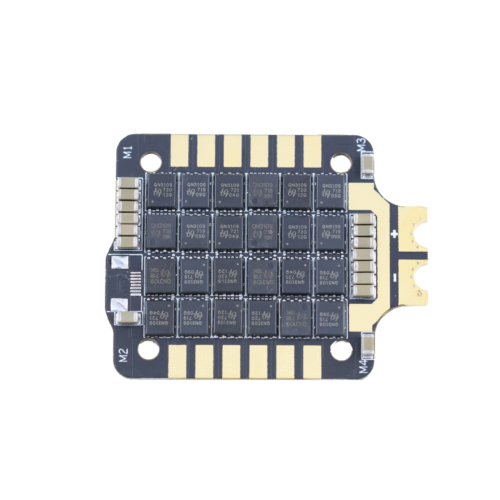
- 4x RX6 pad(one per corner) for BLheli32 ESC telemetry
- 4x individual ESC power/signal pads
- 1x Group of G/S1/S2/S3/S4 pads for 4in1 ESC Signal/GND
- 3x LEDs for FC STATUS (Blue, Green) and 3.3V indicator(Red)
- Built in inverter on UART2-RX for SBUS input
- PPM/UART Shared: UART2-RX
- Vbat filtered output power for VTX
- Camera control: Yes
- Smartaudio & Tramp VTX protocol: Yes
- DJI FPV OSD protocol: Yes
- WS2812 Led Strip : Yes
- Beeper : Yes
- RSSI: Yes
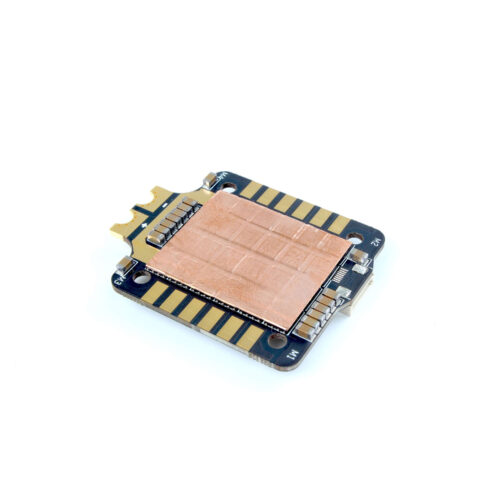
PDB SPECIFICATIONS
- Input: 6~36V (2~8S LiPo) w/TVS protection
- PDB: 4x35A (Max.4x46A)
- BEC: 5V 2A cont. (Max.3A)
- LDO 3.3V: Max.200mA
- Current Sensor 184A (Scale 179 in INAV/BF)
- Battery Voltage Sensor: 1K:10K
FIRMWARE
- INAV: MATEKF405SE
- BetaFlight: MATEKF405SE
- ArduPilot: MATEKF405-WING
PHYSICAL
- Mounting: 30.5 x 30.5mm, Φ4mm with Grommets Φ3mm
- Dimensions: 36 x 46 mm
- Weight: 10g
INCLUDING
- 1x F405-SE
- 6x silicon grommets M4 to M3
- 1x FR4 PCB Plate 36*36*1mm
- 1x Rubycon ZLH 35V/470uF (Low ESR)
IMPORTANT NOTES AND TIPS
-
- *** known issue/bug: BetaFlight doesn’t support barometer DPS310 working with STM32F405.
- F405-SE has INAV firmware preloaded for QC
- INAV2.5.1 downloaded from configurator doesn’t support new barometer DPS310. download customized firmware from here.
- DPS310 will be supported officially by INAV2.6 and new configurator.
- ArduPilot Firmware “MATEKF405-WING″ prior to June 25 does not support the onboard barometer DPS310. pls download firmware from “latest” folder.
inav_2.5.1_MATEKF405SE_DPS310.hex
If Baro can’t be detected. In INAV CLI mode, type command
- set baro_hardware = DPS310
- save
betaflight_4.2.0_MATEKF405SE.hex
- known issue/bug: DPS310 will not work even if you type the following CLI command.
- set baro_bustype = I2C
- set baro_i2c_device = 1
- set baro_i2c_address = 118
- set baro_hardware = DPS310
- save
| PWM | Pad | PIN Name | TIM | INAV Multi-Rotor | INAV Plane | BetaFlight Multi-Rotor |
| S1 | PB7 | TIM4_CH2 | Motor | Motor | Motor | |
| S2 | PB6 | TIM4_CH1 | Motor | Motor | Motor | |
| S3 | PB0 | TIM3_CH3 | Motor | Servo | Motor | |
| S4 | PB1 | TIM3_CH4 | Motor | Servo | Motor | |
| S5 | PC8 | TIM8_CH3 | Motor | Servo | Motor | |
| S6 | PC9 | TIM8_CH4 | Motor | Servo | Motor | |
| S7 | PB14 | TIM12_CH1 | Servo | Servo | Motor, No DShot | |
| S8 | PB15 | TIM12_CH2 | Servo | Servo | Motor, No DShot | |
| S9 | PA8 | TIM1_CH1 | Servo | Servo | Motor | |
| LED | PA15 | TIM2_CH1 | 2812LED | 2812LED | 2812LED |
| ADC | No pad 1K:10K divider builtin 0~36V input |
on board battery voltage | INAV Scale 1100 BataFlight Scale 110 |
| No pad 0~3.3V |
on board current sensor | Sacle 179 | |
| RSSI Pad 0~3.3V |
Analog RSSI | ||
| I2C | DA2 CL2 | I2C2 | Magnetometer (HMC5883 /MAG3110 /QMC5883 /IST8310) |
| DA2 CL2 | I2C2 | AirSpeed (MS4525) | |
| DA1 CL1 | I2C1 | OLED 0.96″ | |
| DA1 CL1 | I2C1 | External Barometer MS5611 | |
| I2C1 | on board Barometer DPS310 | ||
| UART | TX1 RX1 | UART1 | Bluetooth |
| TX2 RX2 | UART2 | Receiver (CrossFire) | |
| RX2 | UART2 | Receiver (IBUS, Spektrum DSM/SRXL , SUMD) | |
| RX2 | Receiver PPM (disable Serial RX on UART2) | ||
| Sbus | UART2 | Receiver SBUS, Built-in inverter on UART2-RX | |
| TX2 | Softserial1_TX | Frsky SmartPort | |
| TX3 RX3 | UART3 | DJI FPV OSD | |
| TX3 | UART3 | VTX CMS Control (SA, TR) | |
| TX4 RX4 | UART4 | Spare | |
| TX5 RX5 | UART5 | GPS | |
| RX6 | UART6 | ESC Telemetry |
BetaFlight
Remap S9 as PWM camera control
- resource camera_control A08
- PWM camera control doesn’t 100% work with every camera due to the camera voltage tolerance.
Remap TX2 as Softserial1_TX
- resource serial_tx 11 A02
Remap S7/S8 as servos
-
- resource SERVO 1 B14
- resource SERVO 2 B15




Reviews
There are no reviews yet.