

Description
MATEK GNSS M9N-CAN, UAVCAN & MSP
AP F303 CAN node, NEO-M9N, QMC5881L, DPS310, I2C, UART1 & UART3 breakout. UAVCAN protocol & UART_MSP
Matek M9N-CAN

M9N-CAN is based on ArudPilots’ AP_Pheriph firmware, It is a GNSS+COMPASS+BAROMETER peripheral with CAN/UAVCAN and UART/MSP interfaces to the autopilot, plus an I2C expansion bus for additional peripherals, such as airspeed sensors.
M9N-CAN uses multi-constellation GNSS powered by u-blox NEO-M9N , NEO-M9N is a concurrent GNSS receiver which can receive and track multiple GNSS systems. Owing to the multi-band RF front-end architecture all four major GNSS constellations, GPS,Galileo, GLONASS and BeiDou can be received concurrently.
Specifications
GNSS u-blox NEO-M9N (GPS, GLONASS, Galileo and BeiDou)
Magnetic Compass QMC5883L
Barometer DPS310
ArduPilot AP_Periph F303 CAN node
UART1, Firmware update
UART2, onboard NEO-M9N
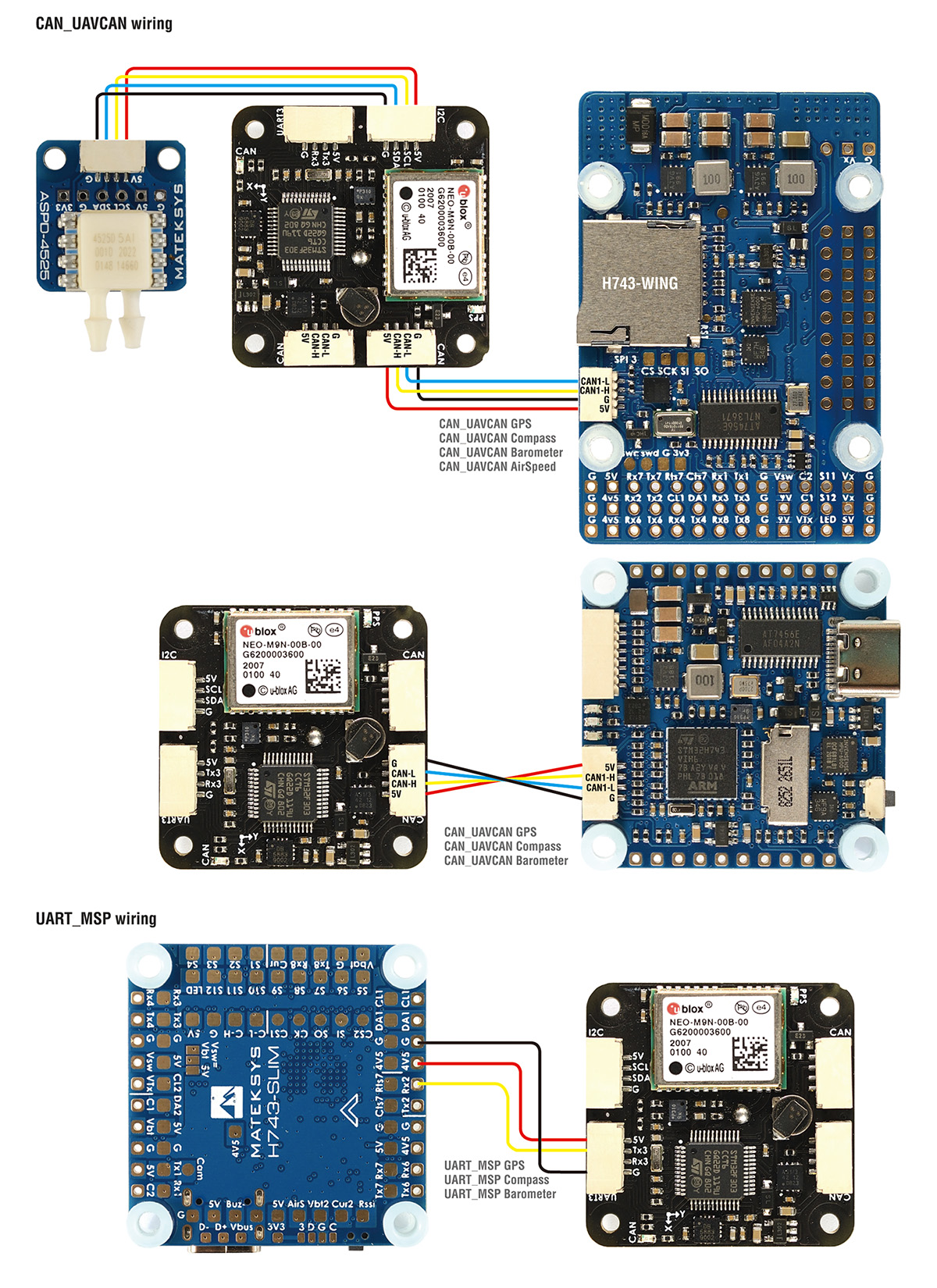
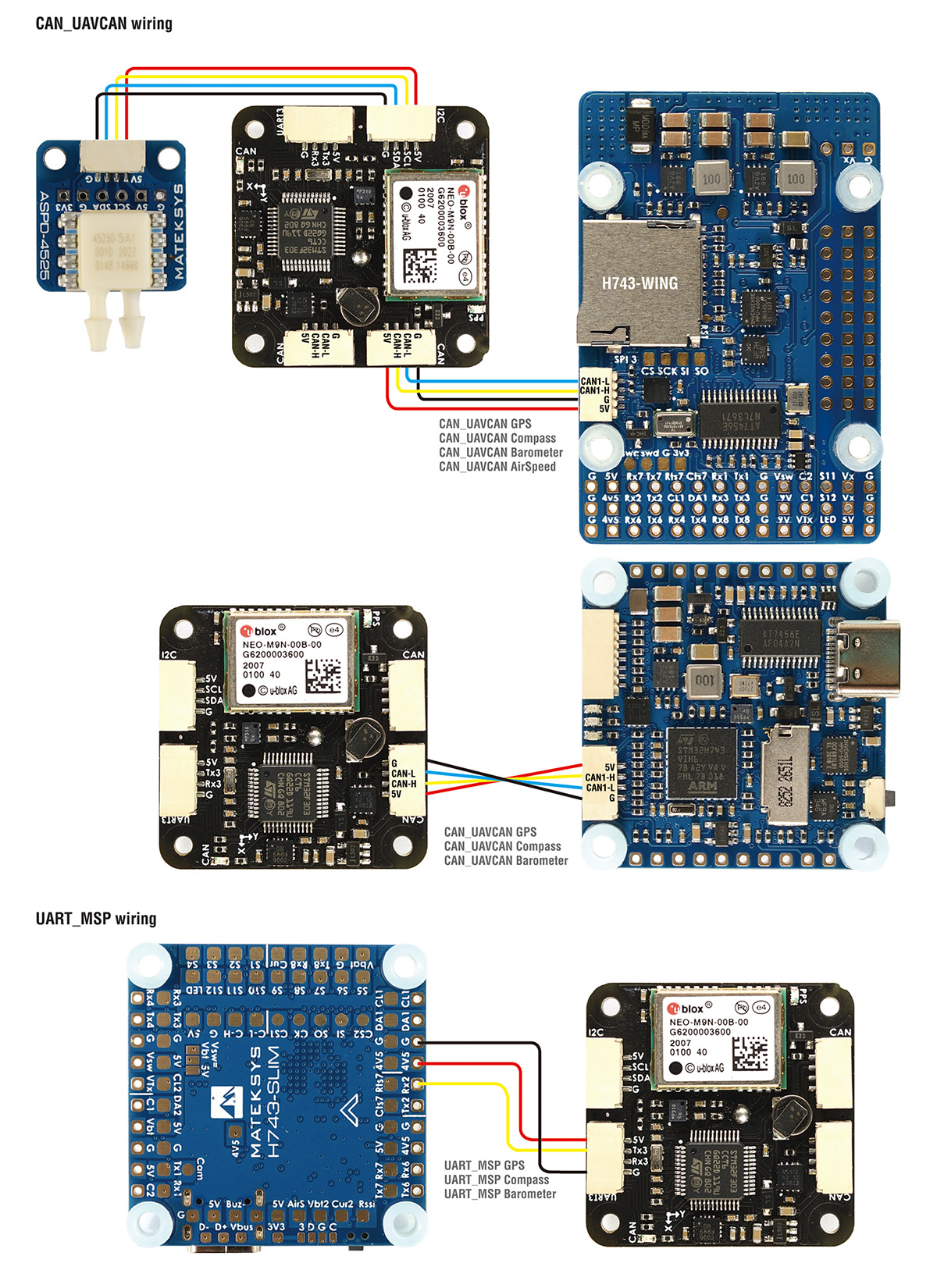
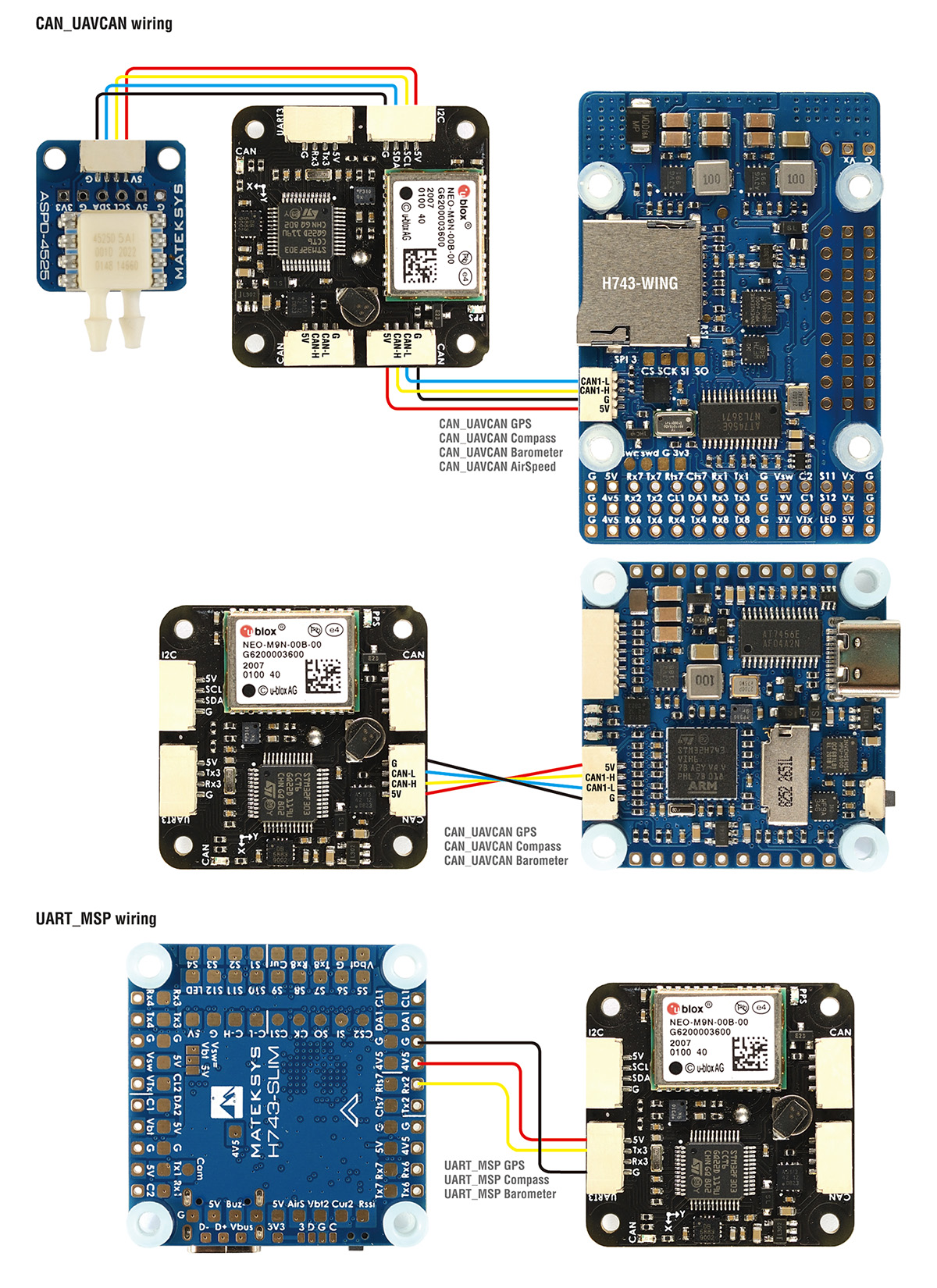
UART3, MSP Protocol
CAN, UAVCAN Protocol
I2C, onboard QMC5883L & DPS310
I2C JST-GH connector, external AirSpeed sensor
CAN bootloader LED, BlueFast blinking, No communication between CAN node and Flight Controllers
Slow blinking, Communicating between CAN node and Flight Controllers
GNSS PPS LED, Greenblinking(1Hz) when GNSS has 3D fixed
Input voltage range: 4.5~5.5V (5V pad/pin)
Power consumption: 100mA
Operating Temperatures: -20~80 °C
32mm*32mm*10mm
15g
Includes
1x M9N-CAN
2x JST-GH-4P to JST-GH-4P 20cm silicon wire
Tips
Compass Alignment(Arrow forward and flat mounting):
Ardupilot/Mission Planner: Rotation None
Make sure to have compass/magnetometer 10cm away from power lines/ESC/motors/iron based material
The scratches on ceramic antenna are the result of tuning the antenna.
HD cameras(Gopro, Split, Tarsier, etc) could interfere GPS signal, try turning off HD camera before GPS 3D fix



Reviews
There are no reviews yet.